Loading...
Searching...
No Matches
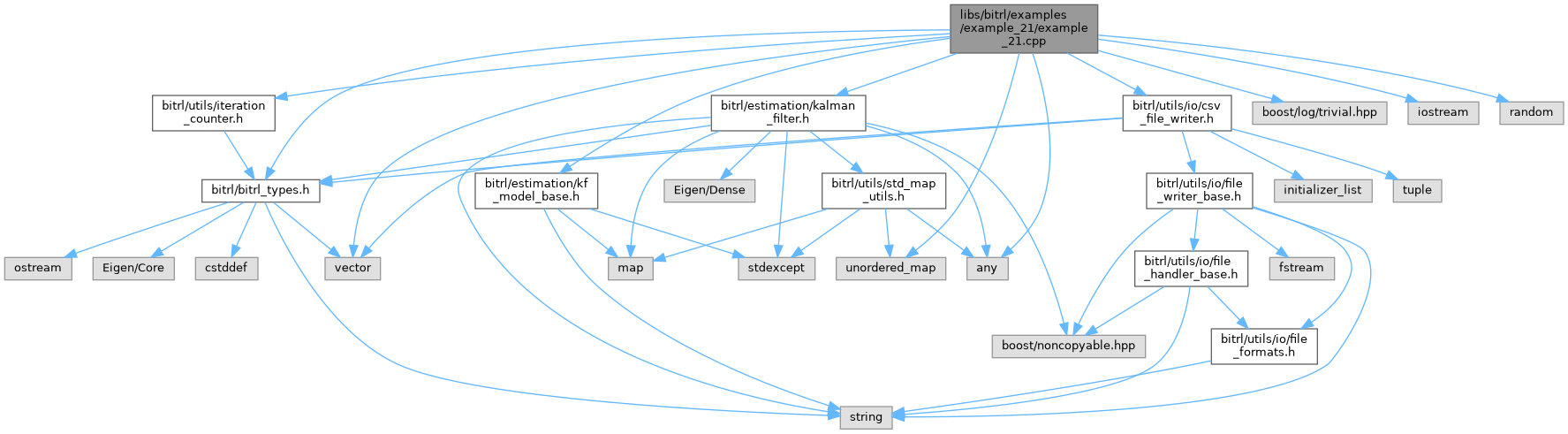
#include "bitrl/bitrl_types.h"#include "bitrl/estimation/kalman_filter.h"#include "bitrl/estimation/kf_model_base.h"#include "bitrl/utils/iteration_counter.h"#include "bitrl/utils/io/csv_file_writer.h"#include <boost/log/trivial.hpp>#include <iostream>#include <unordered_map>#include <any>#include <vector>#include <random>
Include dependency graph for example_21.cpp:
Classes | |
| struct | example_1::Cmd |
| struct | example_1::MotionModel |
| struct | example_1::ObservationModel |
Namespaces | |
| namespace | example_1 |
Macros | |
| #define | BOOST_LOG_DYN_LINK |
Typedefs | |
| typedef MotionModel | example_1::motion_model_type |
| typedef ObservationModel | example_1::obs_motion_type |
Functions | |
| int | main () |
Variables | |
| real_t | example_1::DT = 1.0 |
| real_t | example_1::SIM_TIME = 50.0 |
| const real_t | example_1::STD = 0.1 |
| const real_t | example_1::MU = -0.37727 |
Macro Definition Documentation
◆ BOOST_LOG_DYN_LINK
| #define BOOST_LOG_DYN_LINK |
KalmanFilter example. The example is taken from the paper An Introduction to the Kalman Filter by Greg Welch and Gary Bishop
Function Documentation
◆ main()
| int main | ( | ) |