Loading...
Searching...
No Matches
quadrotor_dynamics.h File Reference
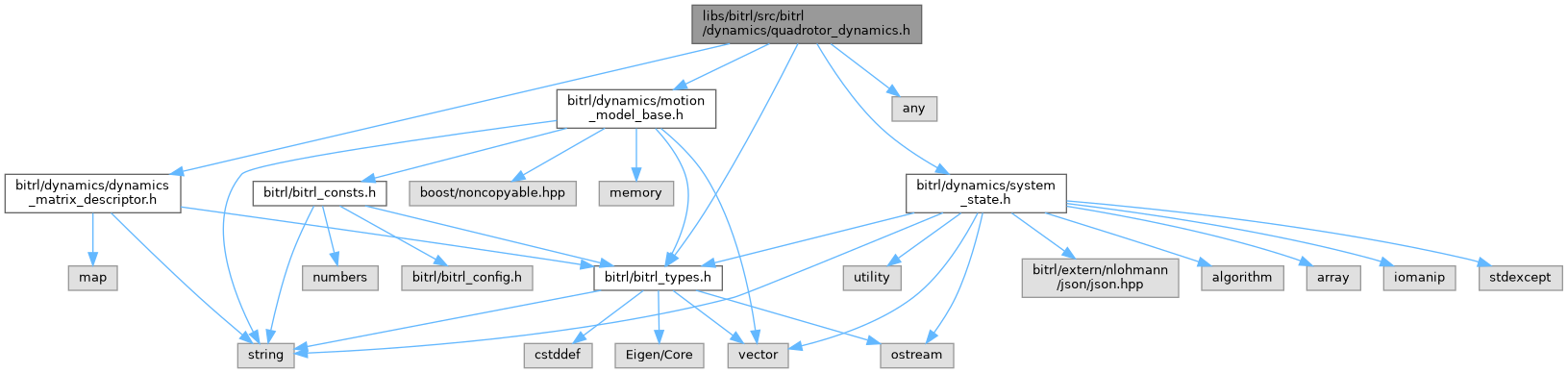
#include "bitrl/bitrl_types.h"#include "bitrl/dynamics/dynamics_matrix_descriptor.h"#include "bitrl/dynamics/motion_model_base.h"#include "bitrl/dynamics/system_state.h"#include <any>
Include dependency graph for quadrotor_dynamics.h:
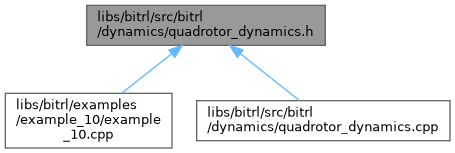
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | bitrl::dynamics::QuadrotorDynamicsConfig |
| class | bitrl::dynamics::QuadrotorDynamics |
| The QuadrotorDynamics class. Implements quadrotor dynamics The implementation of this class follows the System Modeling section at https://wilselby.com/research/arducopter/modeling/ and https://scholarsarchive.byu.edu/cgi/viewcontent.cgi?article=2324&context=facpub The quadrotor is assumed to have four rotors Each rotor consists of a brushless DC motor and rotor with a fixed pitch. It is assumed that the quadrotor can move in 6 degrees of freedom; 3-translational and 3-rotational, The motion of the quadrotor is controlled via 4 inputs namely the speeds of the 4 motors. The quadrotor model that this class implements assumes the following: More... | |
Namespaces | |
| namespace | bitrl |
| namespace | bitrl::dynamics |