Loading...
Searching...
No Matches
bicycle_vehicle_model_dynamics.h File Reference
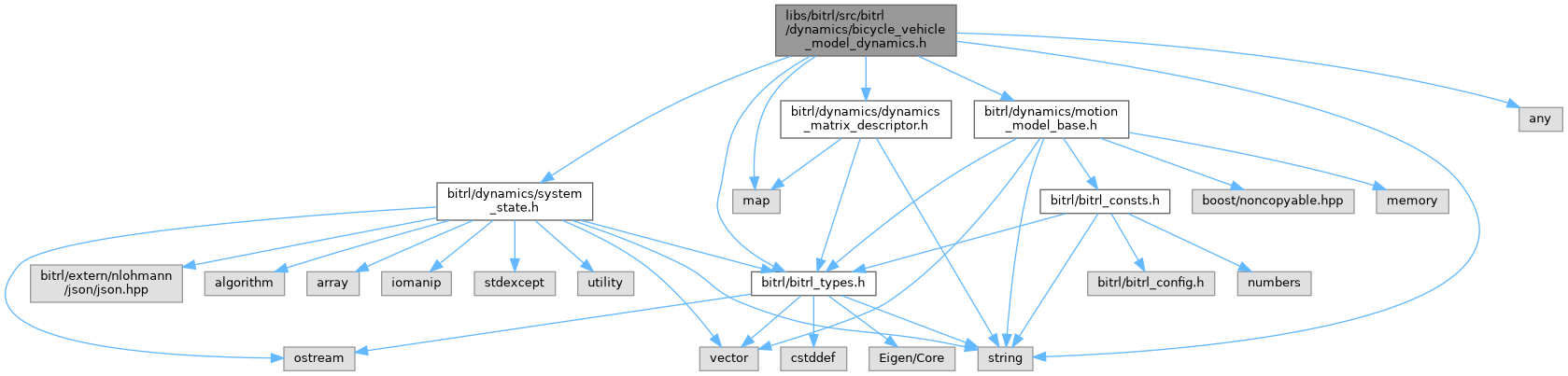
#include "bitrl/bitrl_types.h"#include "bitrl/dynamics/dynamics_matrix_descriptor.h"#include "bitrl/dynamics/motion_model_base.h"#include "bitrl/dynamics/system_state.h"#include <any>#include <map>#include <string>
Include dependency graph for bicycle_vehicle_model_dynamics.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | bitrl::dynamics::BicycleVehicleModelDynamicsConfig |
| class | bitrl::dynamics::BicycleVehicleModelDynamics |
| The BicycleVehicleModelDynamics class. Implements the bicycle vehicle model dynamics. The implementation of the dynamics is taken from the paper: Deep Reinforcement Learning for Mobile Robot Path Planning by Hao Liu, Yi Shen, Shuangjiang Yu, Zijun Gao, Tong Wu The state of the model is described by the tuple (X, Y, Phi) where (X,Y) denotes the 2D position of the vehicle in the world coordinates and phi denotes the heading of the vehicle. More... | |
Namespaces | |
| namespace | bitrl |
| namespace | bitrl::dynamics |